Мой вариант...
Тумблер трехпозиционный. Постоянно опрашивается в loop. 1-ая позиция - скорость отбора №1. 2-ая позиция - скорость отбора №2. Позиция "нейтраль" - опрашивается энкодер - скорость устанавливается оператором.
Задействовано прерывание таймера 1 для управления драйвером двигателя и морганием светодиода.
Всё с внешними подтягивающими резисторами.
Пины 2 и 5 используются в качестве GND для удобства монтажа разъемов.
Управление микрошагом и направлением вращения подключены, но не используются. В скетче калибровочного пересчета "паузы" в мл/час нет.
Для энкодера, таймера и дисплея используются библиотеки
Я не программист. Но как иллюстрация - возможно, вреда не нанесет  .
.
// энкодер с 3 внешнми подтягивающими резисторами 10К
#include "GyverEncoder.h" // библиотека https://alexgyver.ru/encoder/
#include <TimerOne.h>
#include <TM1637.h>
// Подключенме энкодера
#define CLK_EN 6
#define DT 7
#define SW 8
#define ENCODER_GND 5 // GND энкодера подключено к этому пину для удобства монтажа
// подключение драйвера шагового двигателя
#define M_0 12 // установка микрошага
#define M_1 13
#define M_2 14
#define STEP_PIN 15
#define DIR_PIN 16 // направление вращения
// подключение трехпозиционного тумблера
#define SW_0 4
#define SW_1 3
#define SW_GND 2 // GND тумблера подключено к этому пину для удобства монтажа
// подключение светодиода
#define LED 9
// подключение TM1637
#define CLK 10 //pin TM1637
#define DIO 11 //pin TM1637
Encoder enc1(CLK_EN, DT, SW); //экземпляр энодера
TM1637 tm1637(CLK,DIO); // экземпляр объекта типа TM1637
int const KOEFF_LED = 50; // отношение (нужно подобрать)скорости смены импульсов на двигателе и скорости мигания светодиода
int const REG_B = 2; // базовая скорость отбора "тела"
int const REG_H = 70; // базовая скорость отбора "голов"
byte inFlagSw = 0; // состояние тумблера
bool MICRO_STEP [3] = {0,0,0}; // задает микрошаг
bool DIRECTION = false; // направление вращения
// служебные переменные для прерывания по таймеру
volatile unsigned int motorTimerCount = 0;
volatile unsigned long int ledTimerCount = 0;
volatile unsigned int encoderTimerCount = 0;
int const long TIMER_PERIOD = 250; // период срабатывания таймера
volatile bool ledState = false; // задает состояние светодиода
volatile int motorPulsPause = 77; // пауза между импульсами шагового двигателя (тики таймера)
volatile bool flagMotorRun = true; // запрет/разрешение работы двигателя
volatile bool motorPulse = false; //служебная переменная, чередование пдачи импудьса на мотор 0 1
int const MINIMUM_PAUSE = 1; //максимальная скорость вращение (количество тиков паузы)
int const MAXIMUM_PAUSE = 100; //минимальная скорость вращение (количество тиков паузы
unsigned int ledTimerPause = 0; // определяет частоту мигания светодиода
int dispDigits = 9999; // переменная для вывода на дисплей
//==============================================================================================
void setup() {
Serial.begin(9600);
setPinsMode (); // установка и инициализация пинов вынесена в отдельную процедуру
enc1.setType(TYPE2); // тип энкодера TYPE1 одношаговый, TYPE2 двухшаговый. "Если ваш энкодер работает странно, смените тип"
tm1637.init();// инициализация TM1637
tm1637.set(5);//установка яркости дисплея 0-7
tm1637.clearDisplay();
Timer1.initialize(TIMER_PERIOD); // инициализация таймера 1, период
Timer1.attachInterrupt(timerInterrupt, TIMER_PERIOD); // задаем обработчик прерываний
}
//==============================================================================================
void loop() {
//если тумблер в положенн "вверх" устанавливаем скорость вращения regB
if ( ! digitalRead(SW_0)){
motorPulsPause = REG_B;
if ( !(inFlagSw == 1)) {
dispDigits = motorPulsPause;
displayShow(); // выводим значение на дисплей
}
inFlagSw = 1;
}
//если тумблер в положенн "вниз" устанавливаем скорость вращения regH
if ( ! digitalRead(SW_1)){
motorPulsPause = REG_H;
if ( !(inFlagSw == 2)) {
dispDigits = motorPulsPause;
displayShow(); // выводим значение на дисплей
}
inFlagSw = 2;
}
//если тумблер в положенн "среднее" читаем энкодер
if ( digitalRead(SW_0) & digitalRead(SW_1) ){
inFlagSw = 3;
readEncoder();
}
}
//==============================================================================================
void readEncoder(){
if (enc1.isRight()) motorPulsPause++; // если был поворот направо, увеличиваем на 1
if (enc1.isLeft()) motorPulsPause--; // если был поворот налево, уменьшаем на 1
if (enc1.isFastR()) motorPulsPause = motorPulsPause + 10; // если был быстрый поворот направо, увеличиваем на 10
if (enc1.isFastL()) motorPulsPause = motorPulsPause - 10; // если был быстрый поворот налево, уменьшаем на 10
if (enc1.isRightH()) {
digitalWrite (LED , true); // если было удержание + поворот направо,
flagMotorRun = true; // разрешаем вращение
}
if (enc1.isLeftH()) {
digitalWrite (LED , false); // если было удержание + поворот налево,
flagMotorRun = false; // запрещаем вращение
}
if (enc1.isTurn()) { // если был совершён поворот (индикатор поворота в любую сторону)
// проверяем границы диапазона
if ( motorPulsPause <= MINIMUM_PAUSE){
motorPulsPause = MINIMUM_PAUSE;
}
if ( motorPulsPause > MAXIMUM_PAUSE){
motorPulsPause = MAXIMUM_PAUSE;
}
dispDigits = motorPulsPause;
displayShow();// выводим значение при повороте
// Serial.println(motorPulsPause); // выводим значение при повороте
}
}
void displayShow(){
tm1637.clearDisplay();
//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
// Внимание ! Здесь можно пересчитать паузу в милилитры в час при калибровке
tm1637.display(dispDigits);
}
void timerInterrupt() {
enc1.tick();
motorTimerCount++;
if ( motorTimerCount >= motorPulsPause) {
// после того как количество тиков таймера сравняется с motorPulsPause
// изменяется на противоположный уровень на STEP_PIN и сбрасывается счетчик
motorTimerCount = 0;
if ( flagMotorRun) {
motorPulse = !motorPulse;
digitalWrite (STEP_PIN , motorPulse);
// управление миганием светодиода (забавы ради)
// пусть мигает примерно с частотой падания капель
ledTimerCount++;
if ( ledTimerCount >= motorPulsPause * KOEFF_LED) {
ledTimerCount = 0;
ledState = !ledState;
digitalWrite (LED , ledState);
}
}
}
}
void setPinsMode () {
pinMode(LED, OUTPUT);
digitalWrite (LED , true);
pinMode(M_0, OUTPUT);
pinMode(M_1, OUTPUT);
pinMode(M_2, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(ENCODER_GND, OUTPUT);
pinMode(SW_GND, OUTPUT);
pinMode(SW_0, INPUT);
pinMode(SW_1, INPUT);
digitalWrite (M_0 , MICRO_STEP [0]);
digitalWrite (M_1 , MICRO_STEP [1]);
digitalWrite (M_2 , MICRO_STEP [2]);
digitalWrite (DIR_PIN , DIRECTION);
digitalWrite (ENCODER_GND , false);
digitalWrite (SW_GND , false);
}
-
схема.jpg
size: 170.99Кб
type: jpg
-
схема2.jpg
size: 151.53Кб
type: jpg
С уважением, Олег Кузнецов.





 , заметил. А говорил, что не шаришь в ардуинах.
, заметил. А говорил, что не шаришь в ардуинах. 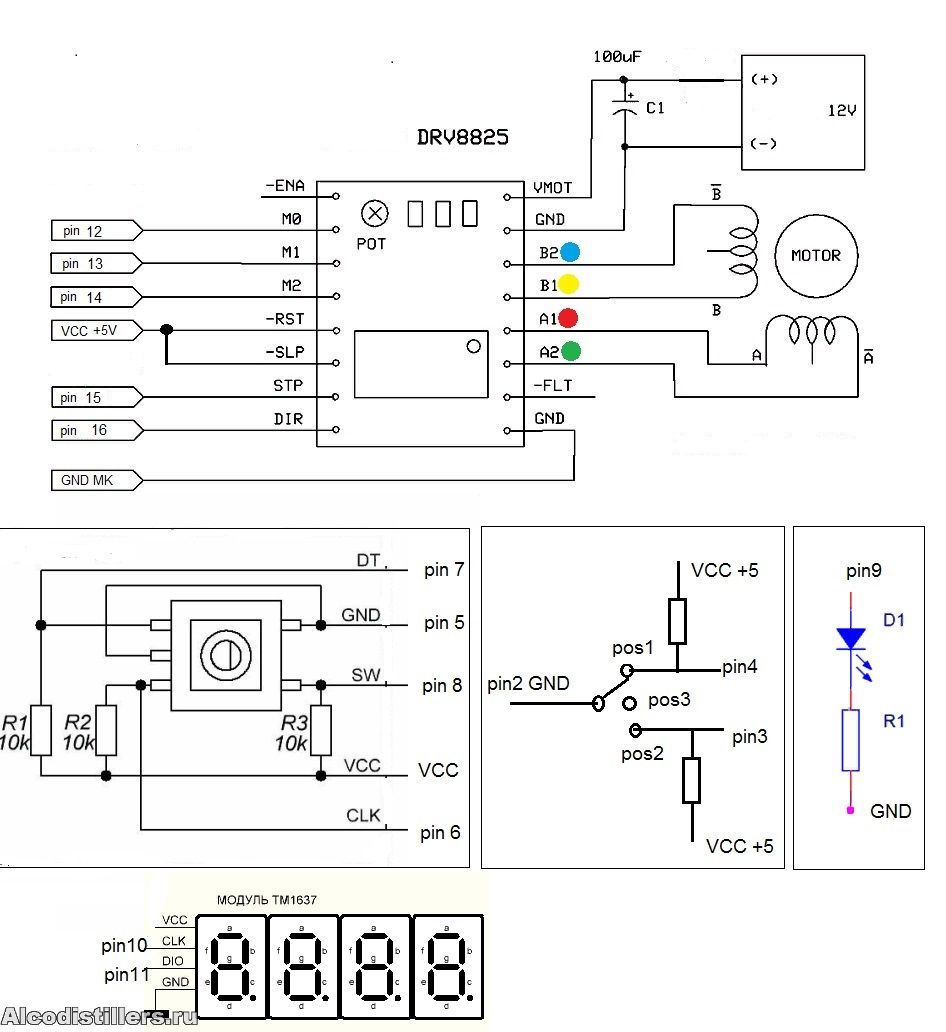
 .
.





